
Нет в наличии
 | Корпус из красивого глянцевого пластика, декорированный красивым принтом, имеет высоту всего 9 см, что позволяет ему свободно пролезть под цоколь кухонного гарнитура, под кровать, кресло и другую мебель. На верхней грани корпуса расположен ИК- сенсор, предназначенный для работы с виртуальной стеной и зарядной станцией, а также сенсорная панель управления, позволяющая быстро выбрать один из трех режимов работы. |
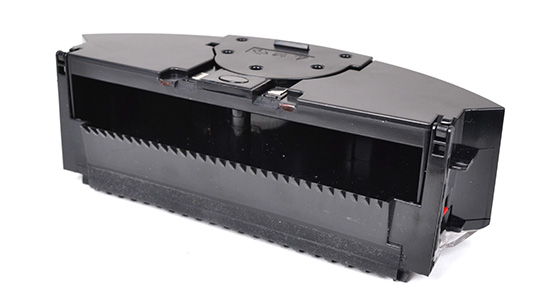 | Традиционного подвижного бампера, позволяющего определять столкновение с препятствием, в этой модели нет. Вместо него разработчики использовали резиновый бампер с расположенными по периметру ИК- сенсорами, измеряющими расстояние до объектов. Забегая вперед, замечу, что широкий угол обзора позволяет роботу эффективно выстраивать маршрут и аккуратно обходить препятствия. Однако, в некоторых случаях робот может не увидеть препятствие. Это может быть тонкая ножка стола или стула. В этом случае робот мягко врезается в нее и, не оставляя следов, тут же немного отъезжает назад и выбирает иной маршрут. В тыльной части корпуса расположен контейнер для раздельного сбора крупного мусора и пыли. Его объем равен 0,37л, чего достаточно для нескольких полных уборок помещения. |
 | Конструктивно контейнер состоит из двух разделенных отсеком. Большой отсек предназначен для сбора крупного мусора, который попадает сюда с помощью двух щеток, расположенных в основании робота. Гребенка на краю отсека обеспечивает удержание мусора в основном контейнере, а мягкий резиновый бортик улучшает сбор пыли в маленький отсек. |
 | Внутри большого отсека расположен мотор, но он используется только для всасывания пыли в маленький нижний отсек, в котором расположен сменный фильтр, исключающий попадание пыли в воздух. Основание контейнера для пыли выполнено из прозрачного пластика, что позволяет с легкостью определить степень наполненности контейнера. При желании, в основании контейнера можно закрепить аксессуар, позволяющий пополнить робот функцией влажной уборки. Очевидно, что в отличие от настоящих моющих роботов, данная конструкция требует частого смачивания водой, но при этом, она не оставляет следов и разводов, которые являются главным недостатком многих моделей моющих роботов-пылесосов. |
 | Xrobot Helper использует традиционную трехколесную платформу. Два ведущих колеса с резиновой шиной расположены на подвесном шарнире, благодаря которому робот может преодолевать порожки, высотой до 20 мм. В передней части корпуса расположено одно опорное колесо, боковая щетка и четыре ИК пары, выполняющие функцию детектора ступенек. |
 | В центральной части расположен блок основных щеток, включающий ворсовую щетку для сбора волос и шерсти животных и резиновую щетки для уборки пола и сбора крупного мусора. Спиралевидная форма ворсовой щетки хорошо подходит для выметания грязи из труднодоступных мест, например, при уборке паркетной доски с фаской. Конструкция блока предусматривает простой механизм извлечения щеток для чистки. Обратите внимание, для установки щеток в корпус используются резиновые колеса с металлическими втулками. Такое решение позволяет заметно снизить вибрацию и уровень шума, издаваемый при вращении щеток. Ниже я еще вернусь к особенностям, используемых щеток, а пока давайте познакомимся с другими элементами Xrobot Helper. |
 | О зарядной станции. Как и многие другие модели, она оборудована ИК- маяком, указывающим роботу путь для выполнения процедуры поиска. Зарядная станция взаимодействует с роботом по радиоканалу на частоте 2.4ГГц. При низком уровне заряда батареи робота он подает сигнал зарядной станции на включение маяка и переходит к процедуре поиска и стыковке. Контактные дорожки расположены не в основании зарядной станции, а на ее вертикальной поверхности. Их большая длина позволяет роботу осуществить стыковку даже под углом, что в некоторых условиях оказывается очень актуально. |
 | Одной из полезных особенностей в конструкции зарядной станции является отсек для хранения лишнего провода от сетевого зарядного устройства. Из собственного опыта могу заметить, что это очень полезное дополнение, позволяющее избавиться от вечно болтающегося и мешающегося провода. |
 | Заряжать Xrobot Helper можно не только при помощи зарядной станции, но и напрямую с помощью сетевого зарядного устройства, для подключения которого предусмотрен разъем на боковой грани корпуса. Здесь же расположена кнопка полного отключения питания. Еще одним важным элементом для любого робота-пылесоса является модуль "виртуальная стена", ограничивающий периметр, в котором может работать робот. В своей практике я часто использую этот модуль. Он позволяет сконцентрировать “внимание” робота на определенному участке, обеспечив тем самым более качественную уборку. Связь между “Виртуальной стеной” и роботом осуществляется в диапазоне 2.4ГГц, при этом сама “стена” формируется с помощью ИК- луча. Максимальная длина “стены” не превышает 3 метров. Для питания “виртуальной стены” используются две батарейки типа AA. |
 | Управлять роботом можно с помощью сенсорной панели управления, включающей три кнопки. С их помощью пользователь может выбрать режим уборки или принудительно отправить робота на зарядную станцию. Для более гибкого управления роботом рекомендуется использовать пульт, входящий в комплект поставки. Пульт имеет форму диска. На его лицевой стороне расположен набор кнопок и ЖК- экран, на котором отображаются текущее время, установки таймера и выбранные режимы работы. |
 Банан © 2018
Банан © 2018
